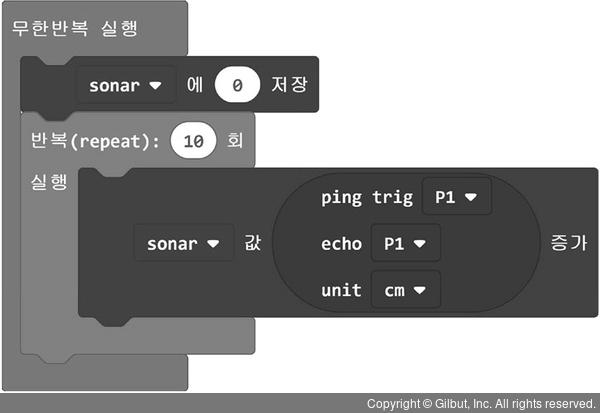
➌ Sonar 꾸러미에서 ping trig P0 / echo P0 / unit μs 블록을 가져와 다음과 같이 ‘1’ 부분에 끼웁니다. 그리고 ‘P0’를 모두 P1으로 바꾸고, 단위(unit)는 cm로 바꿉니다.
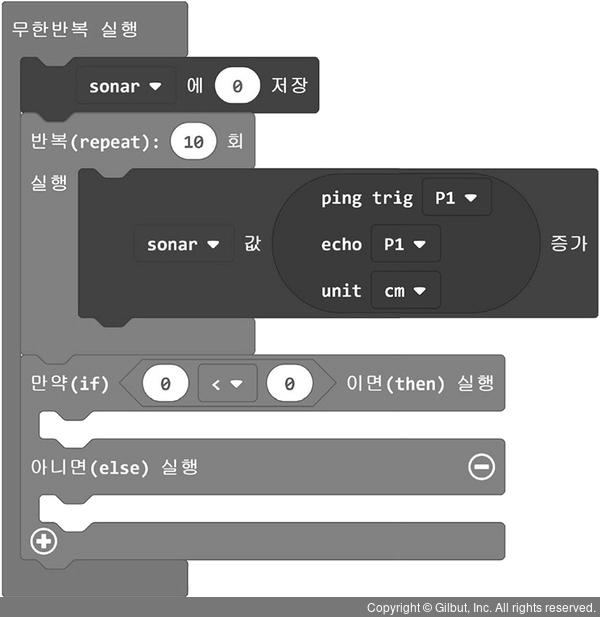
➍ 측정한 센서 값의 평균을 계산하고, 계산한 평균값이 기준 값보다 작으면 서보 모터가 회전하도록 코딩해 보겠습니다. 먼저, 논리 꾸러미에서 만약(if) 참(true)이면(then) 실행 / 아니면(else) 실행 블록을 가져와 연결하고, 다시 논리 꾸러미에서 0 < 0 블록을 가져와 ‘참(true)’ 부분에 끼웁니다.