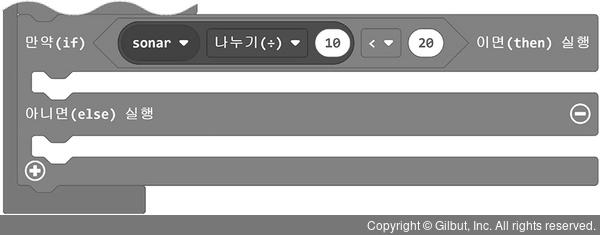
➎ 계산 꾸러미에서 0 나누기 0 블록을 가져와 부등호 왼쪽 ‘0’ 부분에 끼우고, 첫 번째 ‘0’에는 변수 꾸러미의 sonar 블록을 끼우고, 두 번째 ‘0’에는 10을, 부등호 오른쪽 ‘0’에는 20을 입력합니다.
TIP
sonar 변수에는 초음파 센서가 측정한 10번의 센서 값이 모두 더해져 있습니다. 이를 10으로 나누면 평균값이 구해지겠지요? 그리고 부등호 오른쪽에 있는 ‘20’은 임의로 정한 값입니다. 쓰레기통과 사람 사이의 거리가 20cm보다 작으면 서보 모터가 작동하고, 20cm보다 크면 서보 모터가 작동하지 않습니다.
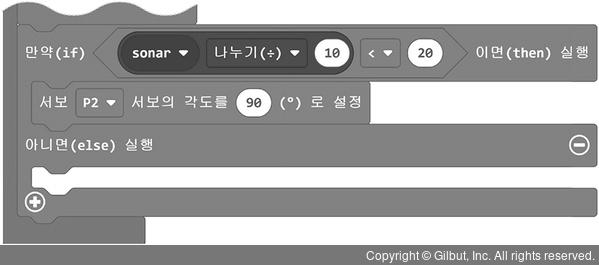
➏ 평균값이 20보다 작으면 서보 모터의 각도를 90으로 설정하여 쓰레기통 뚜껑이 열리도록 서보 꾸러미에서 servo P0 서보의 각도를 90(°)로 설정 블록을 가져와 연결하고, ‘P0’를 P2로 바꿉니다.