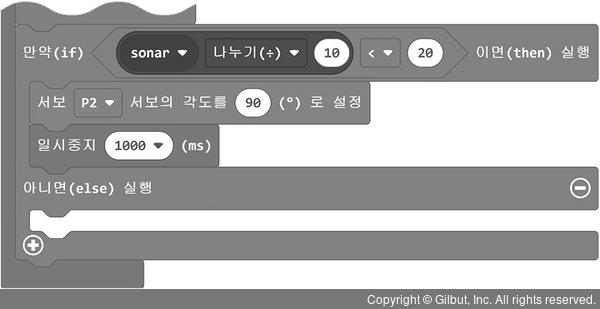
➐ 서보 모터가 작동하여 쓰레기통 뚜껑이 열렸다면 열린 상태를 1초 동안 유지하기 위해 기본 꾸러미에서 일시중지 100 (ms) 블록을 가져와 연결하고, ‘100’을 1000으로 바꿉니다.
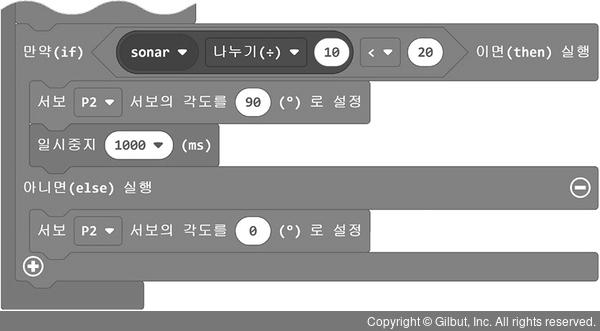
➑ 센서 평균값이 20보다 크면 서보 모터의 각도를 0으로 설정하도록 서보 꾸러미에서 servo P0 서보의 각도를 (90)(°)로 설정 블록을 가져와 아니면(else) 실행 아래에 연결합니다. 그리고 ‘P0’를 P2로 바꾸고 ‘90’을 0으로 바꿉니다.
➐ 서보 모터가 작동하여 쓰레기통 뚜껑이 열렸다면 열린 상태를 1초 동안 유지하기 위해 기본 꾸러미에서 일시중지 100 (ms) 블록을 가져와 연결하고, ‘100’을 1000으로 바꿉니다.
➑ 센서 평균값이 20보다 크면 서보 모터의 각도를 0으로 설정하도록 서보 꾸러미에서 servo P0 서보의 각도를 (90)(°)로 설정 블록을 가져와 아니면(else) 실행 아래에 연결합니다. 그리고 ‘P0’를 P2로 바꾸고 ‘90’을 0으로 바꿉니다.